
面试题
问题: 1~2亿条数据需要缓存,请问如何设计这个存储案例?
回答: 单机单台不可能的,肯定是分布式存储(那如何用redis实现呢?)
解决1: 哈希取余分区

优点: 简单粗暴,直接有效,只需要预估规划好节点,例如3台、8台、10台,就能保住一段时间的数据支撑。使用Hash算法让固定的一部分请求落在同一台服务器上,这样每台服务器固定处理一部分请求(并维护这些请求的信息),起到负载均衡和分而治之的作用
缺点: 原来规划好的节点,进行扩容或者缩容就比较麻烦了,不管扩缩,每次数据变动都会导致节点有变动,映射关系需要重新进行计算,在服务器个数固定不变的时候没有问题,如果需要弹性扩容或故障停机的情况下,原来的取余公式就会发生变化:Hash(key)/3会变成Hash(key)/?。此时地址经过取余运算的结果将发生很大变化,根据公式获取的服务器也会变得不可控。
某个redis机器宕机了,由于台数数量发生变化,会导致hash取余全部数据重新洗牌。
解决2:一致性Hash算法背景
一致性哈希算法在1997年由MIT提出,设计目的是为了解决分布式缓存数据变动和映射问题,某个机器宕机了,分母数量改变了,自然取余数就不可靠了
目的: 当服务器个数发生变动时,尽量减少影响客户端服务器的映射关系
三大步骤:
-
算法构建一致性哈希环
一致性哈希算法必然有个hash函数并按照算法产生的hash值,这个算法的所有可能的哈希值会构成一个全量集,这个集合可以成为一个hash空间[0,232-1],这是一个线性空间,但是在算法中,我们通过适当的逻辑控制将它首位相连(即0 = 232),这样让它在逻辑上形成了一个环形的空间
它也是按照使用取模的方法,前面笔记介绍的节点取模算法是对服务器的数量进行取模,而一致性Hash算法是对232取模,简单来说,
一致性Hash算法将整个哈希值空间组织成一个虚拟的圆环,如假设哈希函数的值空空间为[0,232 -1](即哈希值是一个32位的无符号整型),整个哈希环如下图:整个空间按顺时针方向组织,圆环的正上方的点代表0,0点的右侧的第一个点代表1,以此类推2、3、4、…直到232-1,也就是说0点左侧的第一个点代表232-1,0和232-1在零点方向中重合,我们把这个由232组成的圆环称为Hash环


-
服务器IP节点映射
将集群中的各个IP节点映射到环的某一个位置
将各个服务器使用Hash进行一个哈希,具体可以选择服务器的IP或主机名作为关键字进行哈希,这样每台机器就能确定在其哈希环上的位置。假如4个节点NodeA、B、C、D,能过IP地址的哈希函数计算(hash(ip)),使用IP地址哈希后在环空间的位置如下:

- key落到服务器的落键规则
当我们需要存储一个kv键值对时,首先计算key的hash值,hash(key),这个key使用相同的函数Hash计算出哈希值并确定此数据在环上的位置,从此位置沿环顺时针”行走“,第一台遇到的服务器就是其应该定位到的服务器,并将该键值对存储在该节点上
如我们有ObjectA、ObjectB、ObjectC、ObjectD四个数据对象,经过哈希计算后,在环空间上的位置如下:根据一致性Has,A会被定位到Node A上算法,数据B会被定位到Node B上,C会被定位到Node C上,D会被定位到Node D上。

优点:
-
一致性哈希算法的容错性
假设NodeC宕机,可以看到此时对象A、B、D不会受到影响,只有C对象被重新定位到Node D,在一致性Hash算法中,如果一台服务器不可用,则受影响的数据仅仅是此服务器到环空间中前一台服务器(即沿着逆时针方法行走遇到的第一台服务器)之间的数据,其他不会受到影响。简单而言,就是C宕机了,受到影响的只是B、C之间的数据,并且这些数据会转移到D进行存储

-
一致性哈希算法的扩展性
数据量增加了,需要增加一台Node X,X的位置在A和B之间,那受到影响的也就是A到X之间的数据,重新把A到X的数据录入到X上即可,不会导致hash取余全部数据重新洗牌

缺点: -
一致性哈希算法的数据倾斜问题
一致性Hash算法在服务节点太少时,容易因为节点分布不均匀而造成数据倾斜(被缓存的大部分集中缓存在某一台服务器上)的问题,例如系统中只有两台服务器

总结:
- 为了在节点数目发生改变时尽可能少的迁移
- 将所有的存储节点排列在首尾相接的Hash 环上,每个key在计算Hash后会顺时针找到临近的存储节点存放。
- 而当有节点加入或退出时仅影响该节点在Hash环上
顺时针相邻的后续节点
优点:
加入和删除节点只影响哈希环中顺时针方向相邻的节点,对其他节点无影响
缺点:
数据的分布和节点位置有关,因为这些节点不是均匀分布在哈希环上的,所以在数据在进行存储时达不到均匀分布的效果
解决3:哈希槽分区
1. 为什么出现
为了解决一致性哈希算法的数据倾斜问题
哈希槽实际上就是一个数组,数组[0,214-1]形成hash slot空间
2. 能干什么
解决均匀分配的问题,在数据和节点之间又加入了一层,把这层称为哈希槽(slot),用于管理数据和节点之间的关系,现在就相当于节点上放的是槽,槽里放的是数据
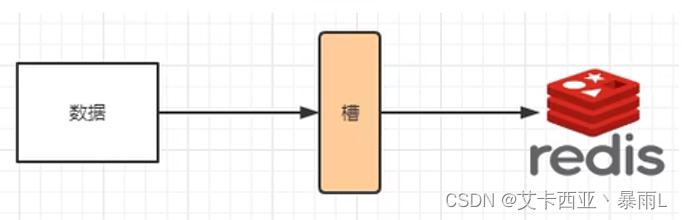
槽解决的是粒度问题,相当于把粒度变大了,这样便于数据移动。
哈希解决的是映射问题,使用key的哈希值来计算所在的槽,便于数据分配。
3. 多少个hash槽
一个集群只能有16384个槽,编号0 ~ 16383(0 ~ 214-1)。这些槽会分配给集群中的所有主节点,分配策略没有要求,可以指定哪些编号的槽分配给哪个主节点。集群会记录节点和槽的对应关系。解决了节点和槽的关系后,接下来就需要对key求哈希值,然后对16384取余,余数是几key就落入对应的槽里。slot=CRC16(key)%16384。以槽为单位移动数据,因为槽的数目是固定的,处理起来比较容易,这样数据移动问题就解决了。
**问题:为什么redis集群最大的槽数是16384个?**
**原理:** Redis集群并没有使用一致性hash而是引入了哈希槽的概念,`Redis集群有16384个哈希槽`,每个key通过CRC16校验后对16384取模来决定放置哪个槽,集群的每个节点负责一部分hash槽。但为什么哈希槽的数量是16384(2^14^)个呢?
**解答:** CRC16算法产生的hash值有16bit,该算法可以产生2^16^=65536个值。换句话说是分布在0~65535之间,那作者在做mod运算的时候为什么不mod65536,而选择mod16384?
**说明1:** 这意味着他们包含原始节点的插槽配置,该节点使用2K的空间和16K的插槽,但是会使用8K的空间(使用65K的插槽 )。
同时,优于其他设计,Redis集群不太可能扩展到1000个以上的主节点。
因此16k处于正确的范围内,以确保每个主机具有足够的插槽,最多可容纳1000个矩阵,但数量足够少,可以轻松地将配置作为原始位图传播。请注意,在小型集群中,位图将难以压缩,因为当N较小时,位图将设置的slot/N位占设置位的很大百分比。
说明2:
-
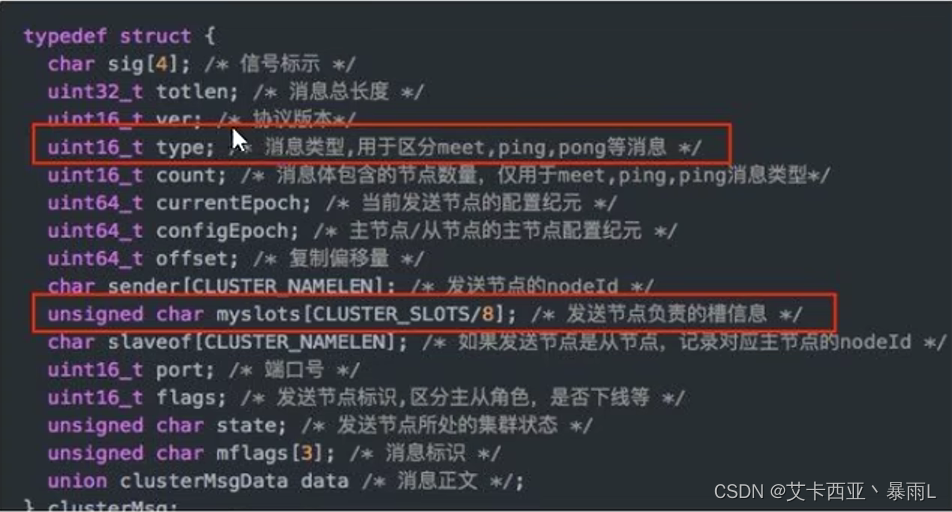
如果槽位为65536,发送心跳的信息头哒8k,发送的心跳包过于庞大。
在消息头中最占空间的是myslots[CLUSTER_SLOTS/8]。当槽位为65536时,这块的大小是65536/8/1024=8kb。因为每秒钟,redis节点需要发送一定数量的ping消息作为心跳包,如果槽位为65536,这个ping消息的消息头太大了,浪费带宽。 -
redis的集群主节点数量基本不可能超过1000个
集群节点越多,心跳包的消息体内携带的数据越大。如果节点过1000个,也会导致网络拥堵,因此redis作者不建议redis cluster节点数量超过1000个。那么对于节点数在1000以内的redis cluster集群,16384个槽位够用了。没有必要拓展到65536个 -
槽位越小,节点越少的情况下,压缩比越高,越容易传输
Redis主节点配置信息中它所负责的哈希槽是通过一张bitmap的形式来保存的,在传输过程中会对bitmap进行压缩,但是如果bitmap的值填充率slots/N很高的话(N表示节点数),bitmap的压缩率就很低。如果节点很少,而哈希槽数量很多的话,bitmap的压缩率就很低。
3.哈希槽的计算
Redis集群中内置了16384个哈希槽,redis会根据节点数量大致均等的将哈希槽映射到不同的节点。当需要在Redis集群中放置一个key-value时,redis先对key使用CRC16算法算出一个结果,然后把结果对16384求余数,这样每个key都会对应一个在0~16383之间的哈希槽,也就是映射到某个节点上。如下代码,key之A、B在Node2,key之C落在Node 3上

版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌侵权/违法违规的内容, 请发送邮件至 举报,一经查实,本站将立刻删除。
文章由极客之音整理,本文链接:https://www.bmabk.com/index.php/post/81892.html

