
文章目录
1. 基本概念
线性方程组计算机解法有直接法和迭代法两大类。
- 直接法:用计算公式直接计算求出线性方程组解的方法。
- 迭代法:用迭代公式通过迭代计算求出满足精度要求的线性方程组近似解的方法。
2. 迭代法
2.1 迭代公式
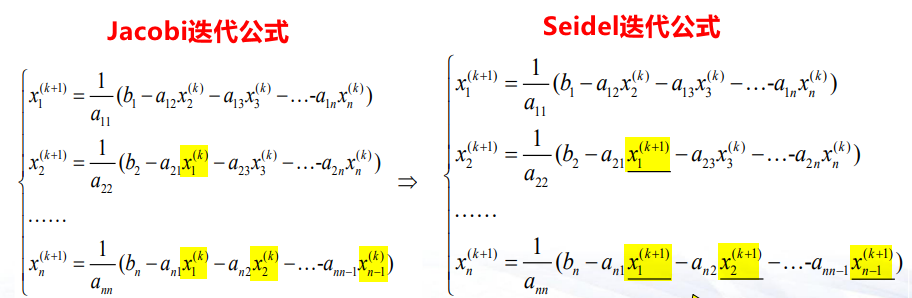
2.2.1 Jacobi 迭代
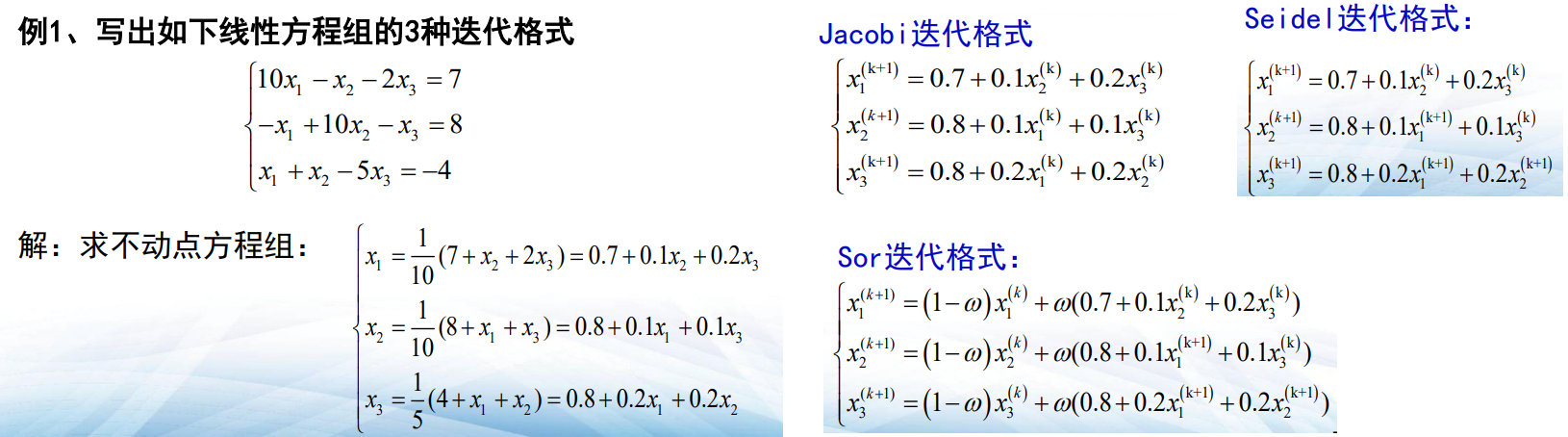
- 迭代公式:分量形式


- 迭代公式:向量形式

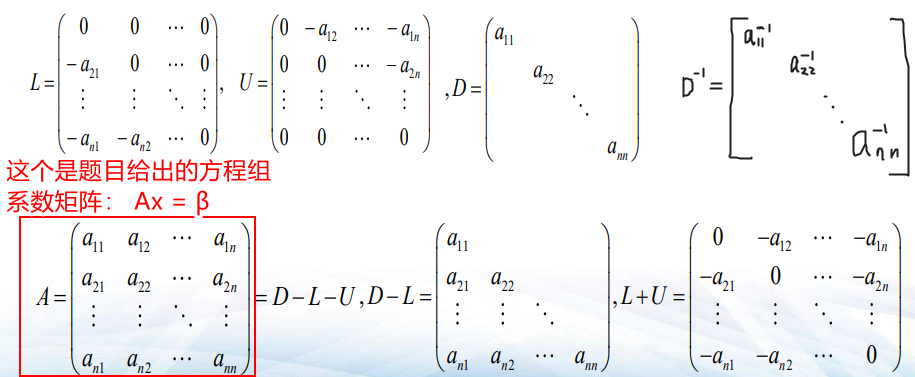
其中D-1、A为:
2.2.2 Seidel 迭代
-
迭代公式:分量形式
- 虽然Seidel由Jacobi改进得到,但是Seidel迭代不能取代Jacobi迭代!。因为前者收敛,后者不一定收敛;后者收敛,前者不一定收敛。
- 另外,Jacobi是并行计算,Seidel是串行计算。随着计算机并行技术的兴起,Jacobi比Seidel要好。
-
迭代公式:向量形式

其中D、L、U为:
2.2.3 Sor 迭代
-
迭代公式:分量形式

-
迭代公式:向量形式

其中D、L、U为:
例题:求分量形式的迭代公式
2.2 判断迭代是否收敛
2.2.1 范数

因此对于向量、矩阵的收敛的定义是使用范数极限来说明的。
-
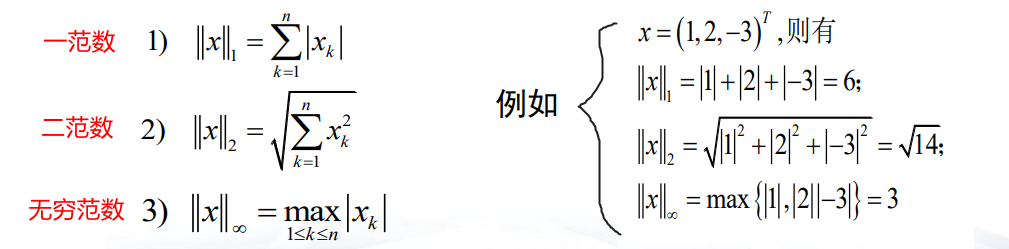
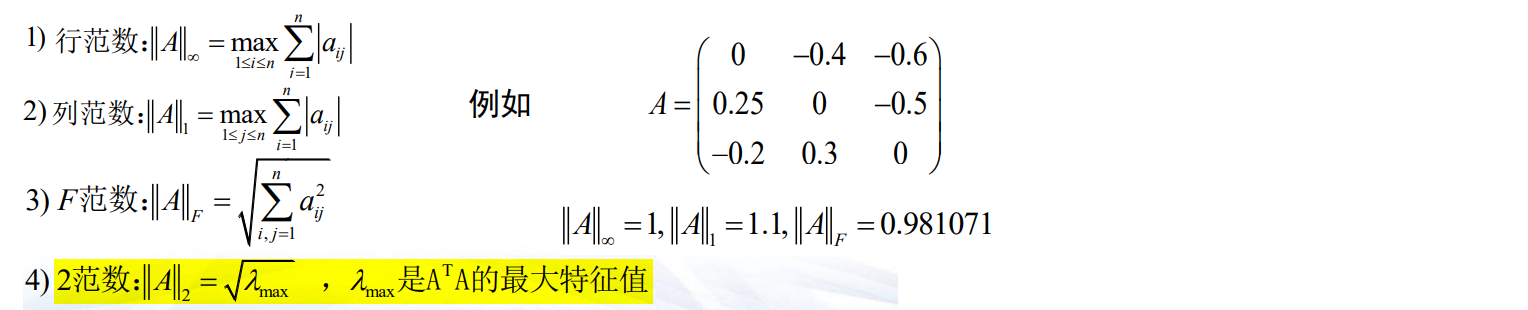
范数定义:

-
向量范数分类:
-
矩阵范数分类:是由向量范数推到而来,堆导过程不做说明。
向量范数 ⇨ 矩阵范数; 矩阵范数 不可推导出向量范数。
-
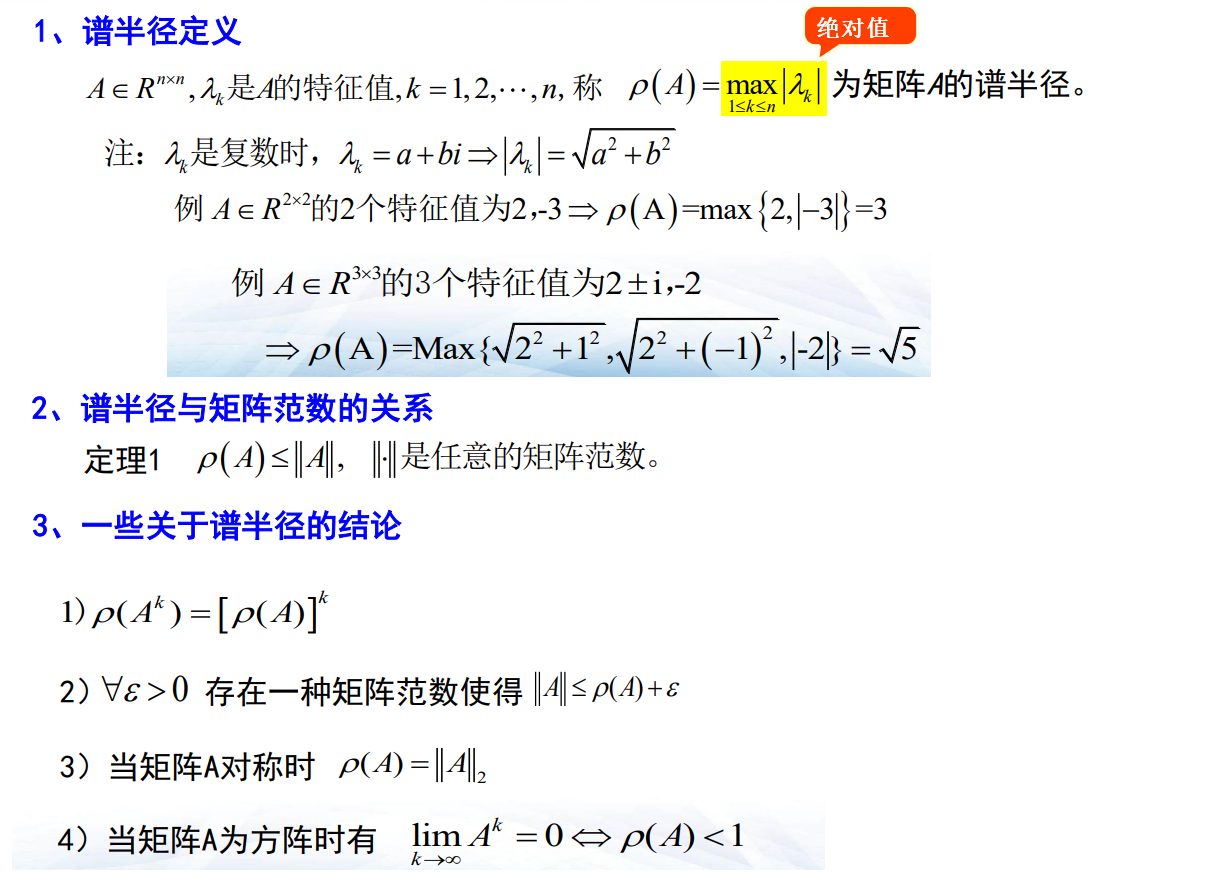
谱半径:
- 快速求特征值的方法:
- 快速求特征值的方法:
2.2.2 迭代收敛定理
使用向量收敛的定义式(即范数极限)去证明迭代收敛,往往较复杂或无法证明。所以,用迭代收敛定理去证。
-
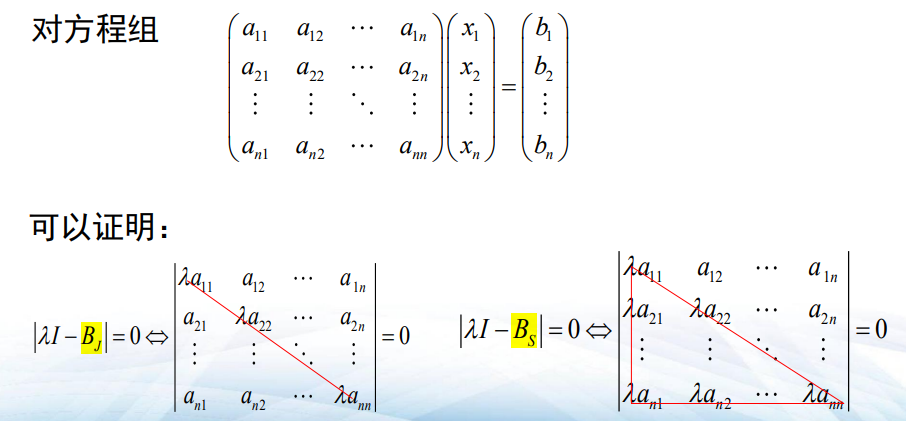
充要条件:

-
充分条件:由充要条件推导出三个充分条件

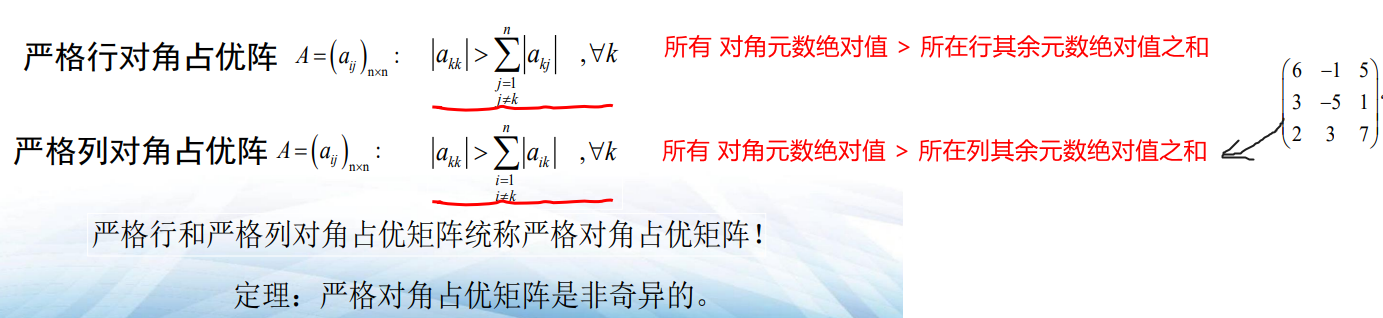
- 什么是严格对角占优阵?
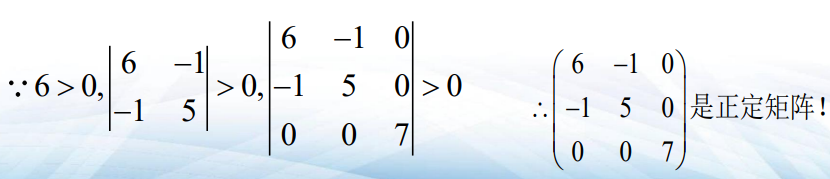
- 什么是正定矩阵?—> 顺序主子式都 > 0
- 什么是严格对角占优阵?
- 技巧:一般先看求得的 BJ、BS、Bω 矩阵的元数是否都小于1,如果都小于1,就试着用第一个充分条件去证迭代收敛;如果存在元素大于1,则用充要条件证。
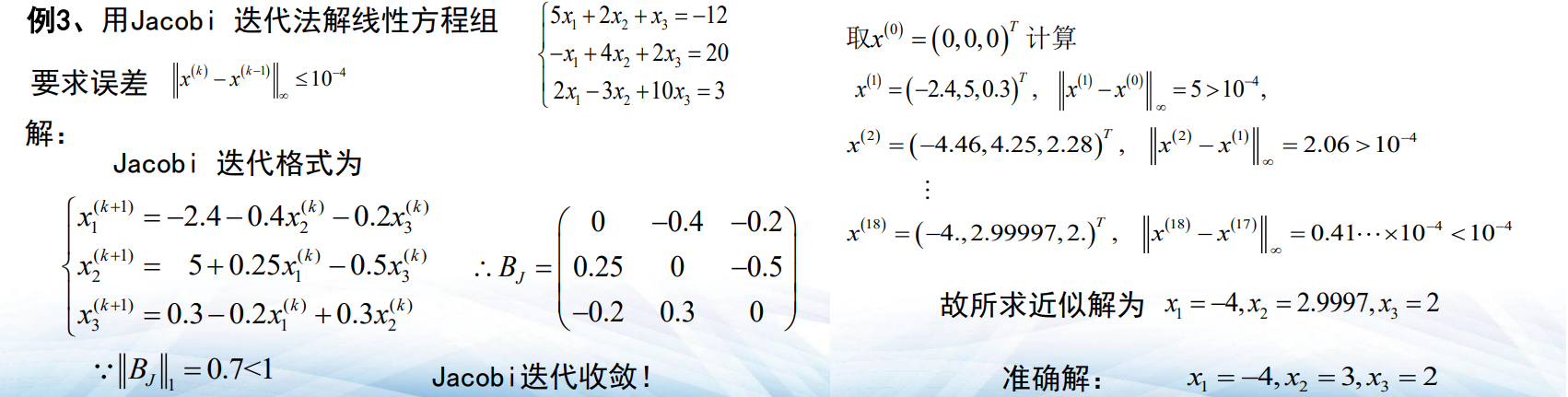
- 例题:
- 用第一个充分条件去证迭代收敛
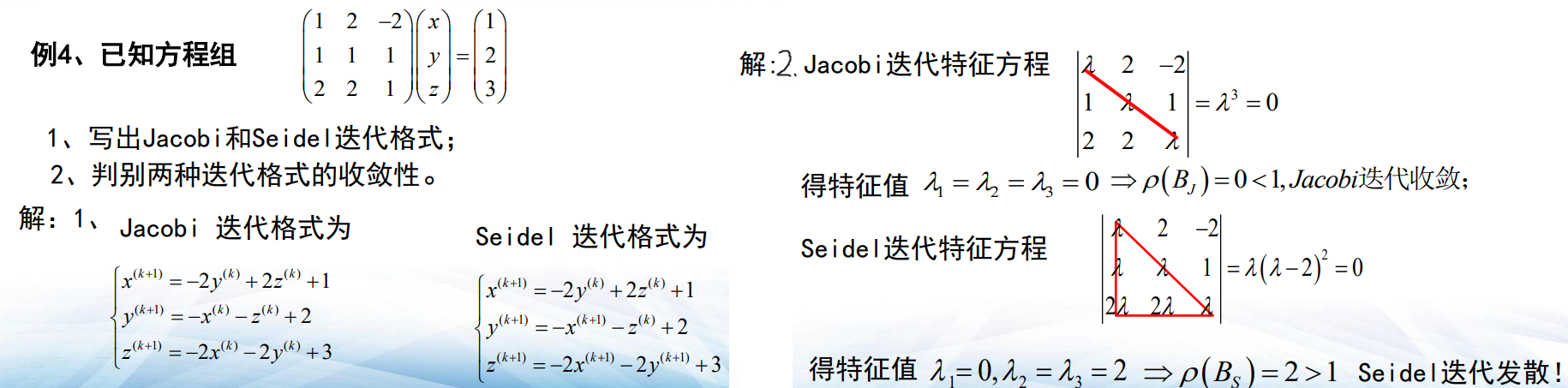
- 用充要条件证迭代收敛
2.3 如何衡量求得近似解的好坏?
- 误差:和简单迭代法的误差非常类似
-
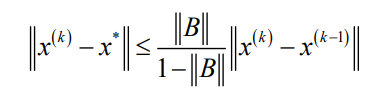
事先估计
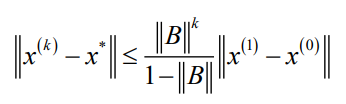
-
事后估计
-
- 收敛阶:因为迭代公式一样,所以收敛阶无意义。
3. 直接法
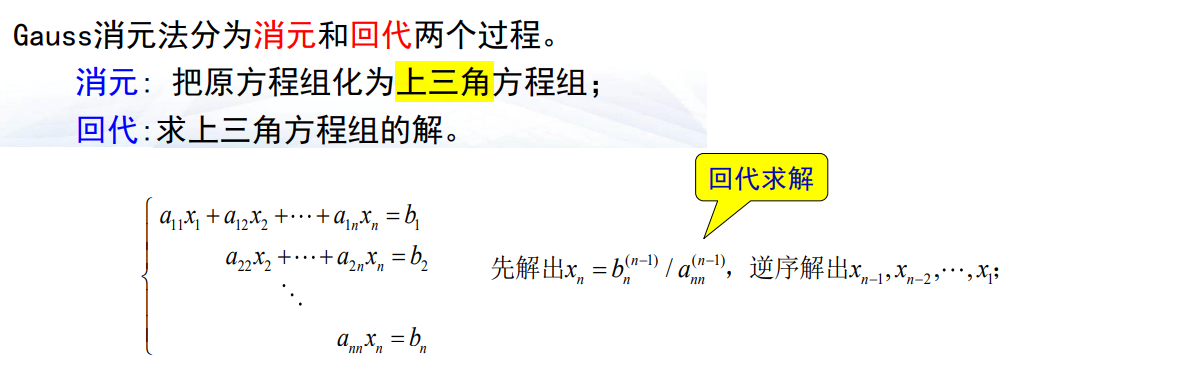
3.1 Gauss消元法
-
定义:
-
使用条件:要求方程组系数矩阵的顺序主子式 > 0
-
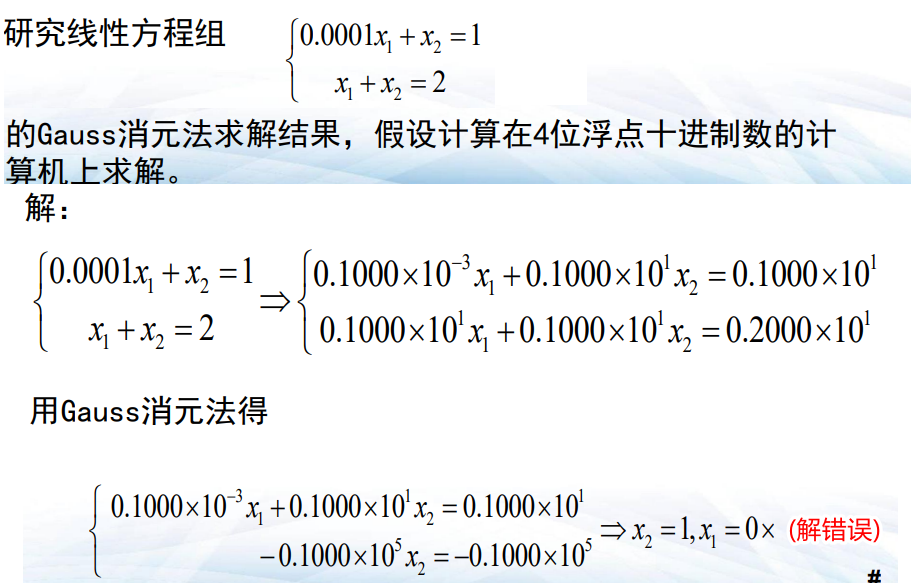
缺点:

比如:
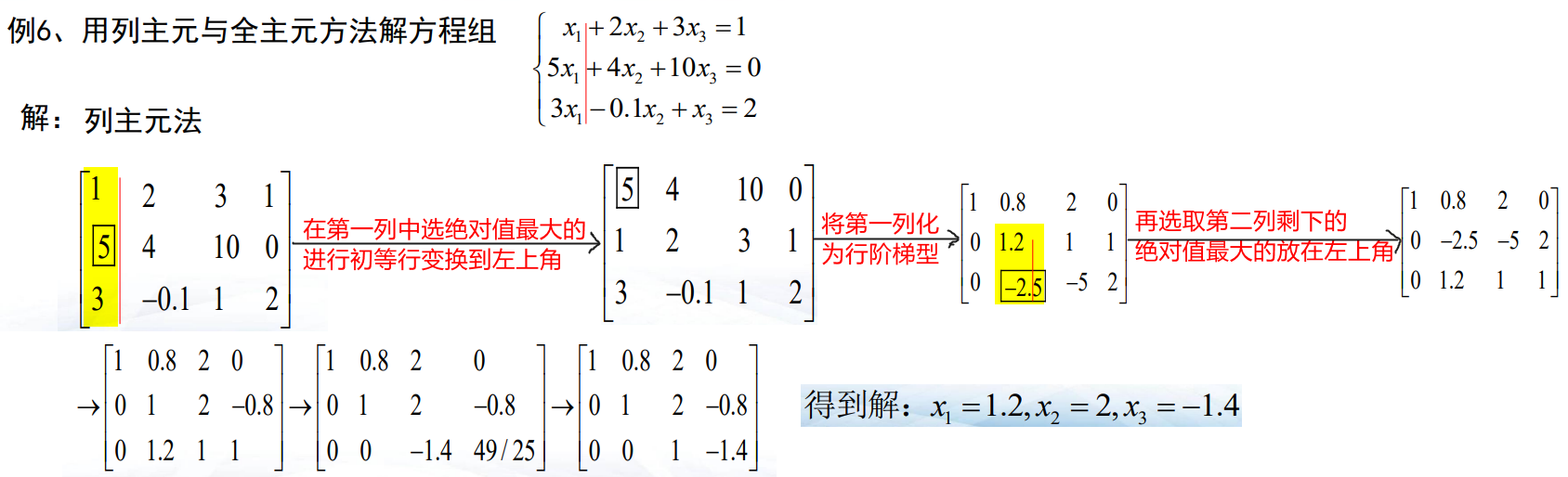
3.2 主元消元法
有两类:
-
列主元消元法
-
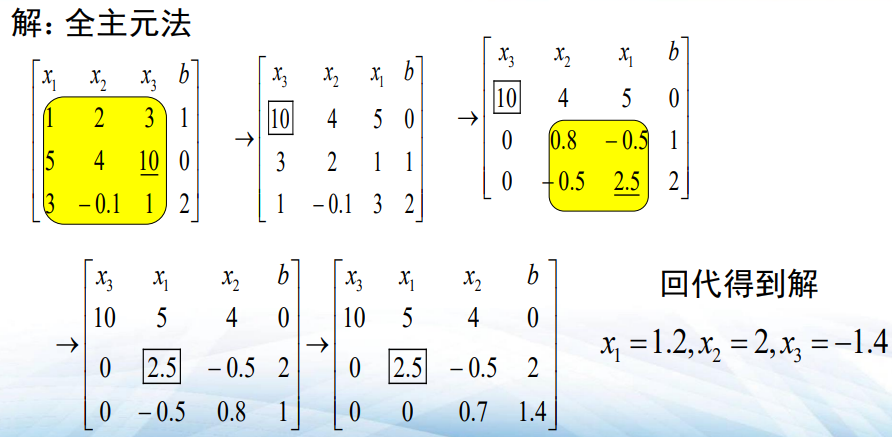
全主元消元法
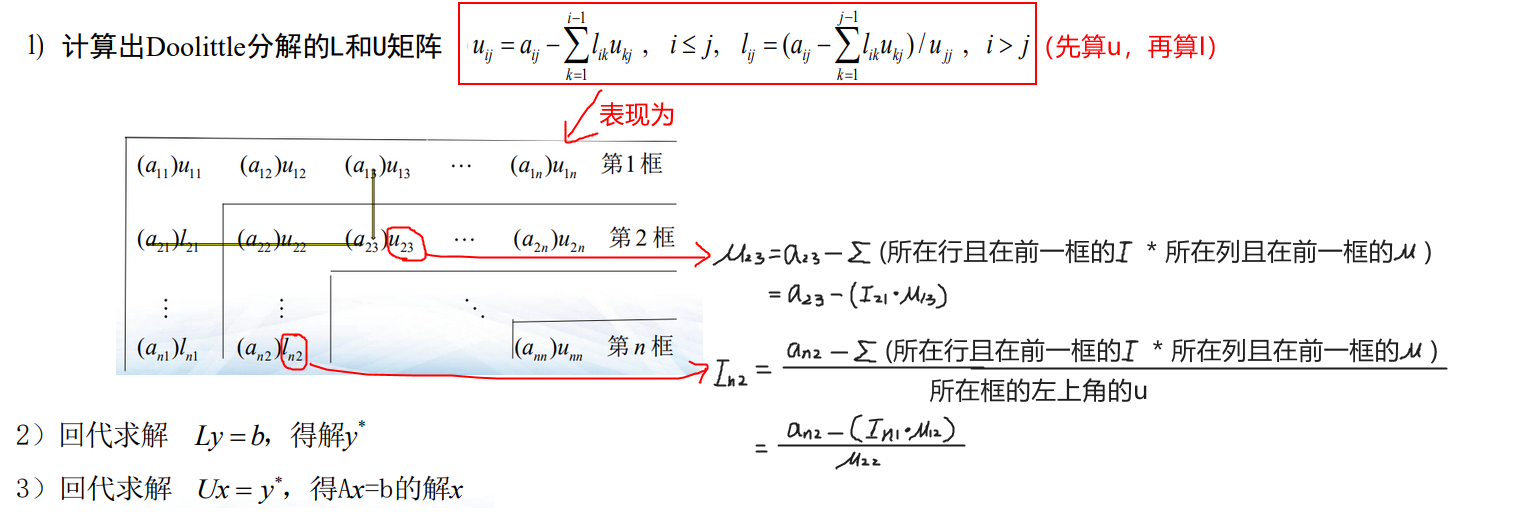
3.3 LU分解法
-
基本思路:将一个复杂的方程组,分解为几个简单的上三角或下三角方程组,再求解。
-
分类:
-
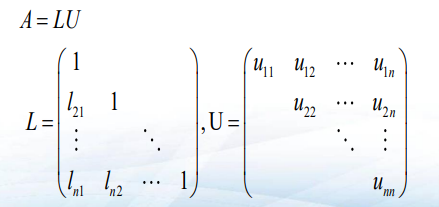
Doolittle分解
-
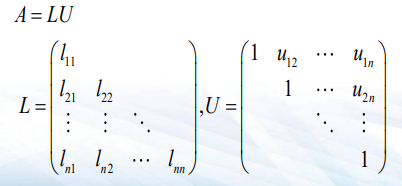
Grout分解
-
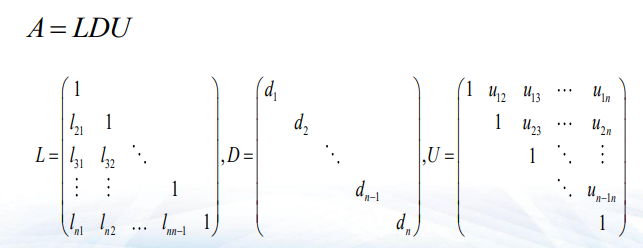
LDU分解
-
-
Doolittle分解求解步骤:
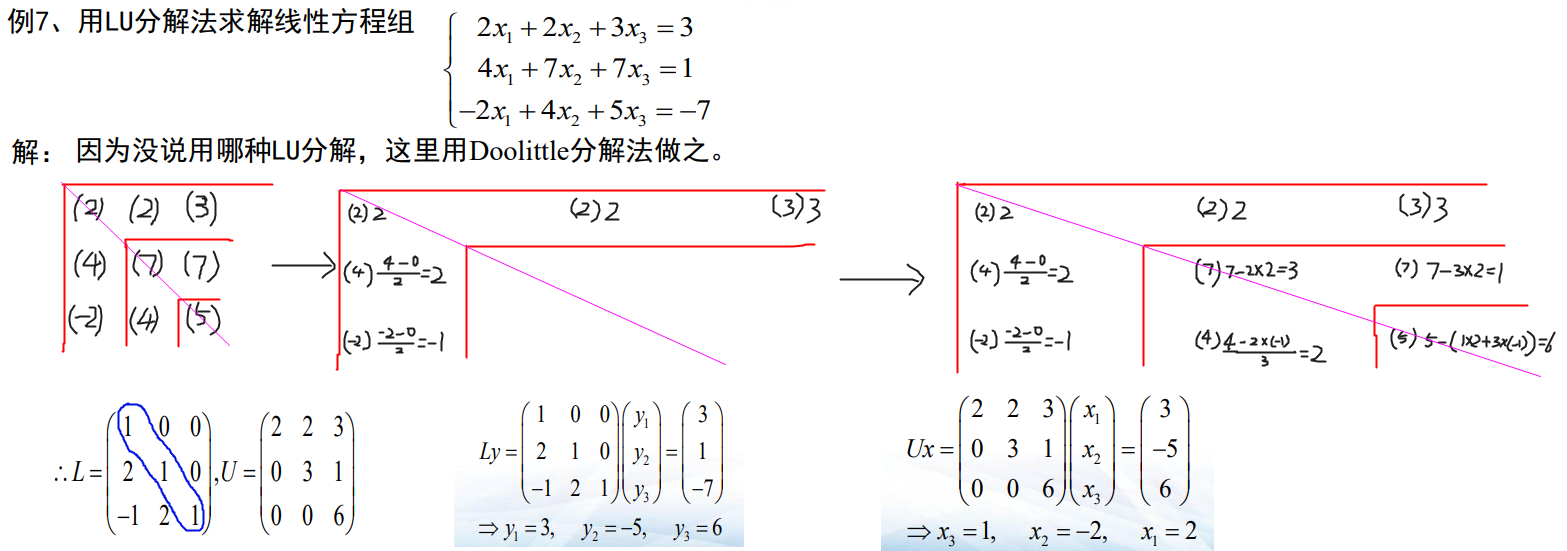
例题:
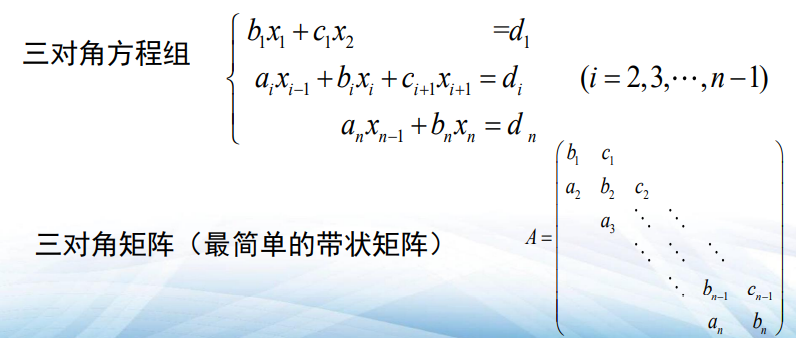
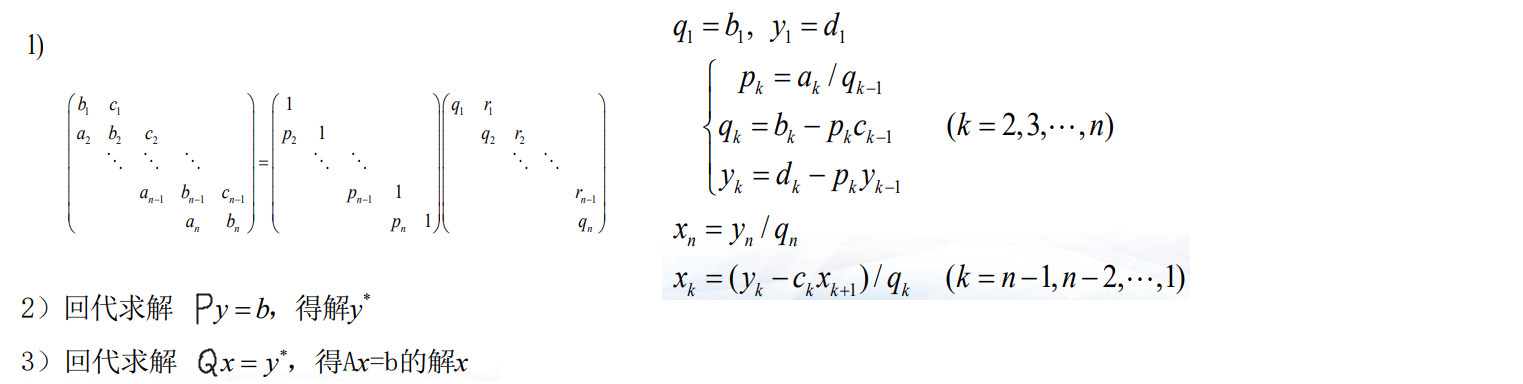
3.4 追赶法
-
追赶法:专门用来求三对角线性方程组。
-
计算步骤:
-
计算量:5n-4
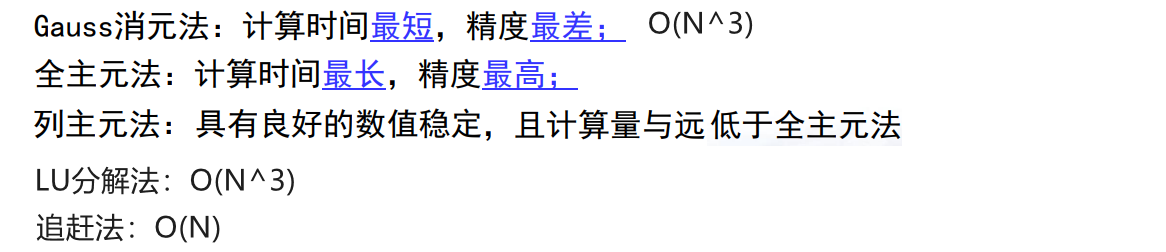
Gauss vs 主元消元法 vs LU分解法 vs 追赶法
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌侵权/违法违规的内容, 请发送邮件至 举报,一经查实,本站将立刻删除。
文章由极客之音整理,本文链接:https://www.bmabk.com/index.php/post/84523.html

