
目录
0、前置知识
0.1 调度性能指标
周转时间:周转时间 = 完成时间 – 到达时间
响应时间:响应时间 = 首次运行时间 – 到达时间
0.2 上下文切换
当一个进程停止时,他的寄存器将被保存在这个内存位置。通过恢复这些寄存器(将他们的值放回实际的物理寄存器中),操作系统可以恢复运行该进程。这种技术叫做上下文切换。
1、进程调度算法简单介绍
1.1 先进先出(FIFO)
先进先出(First In First Out)调度是我们可以实现的最基本的算法,有时也被称为先到先服务(First Come First Served或FCFS)。
优点:简单,易于实现。
举个例子看看为什么FIFO不好:假设A(100s)、B(10s)、C(10s)三个工作几乎同时来到系统,A稍微比B早一点,B稍微比C早一点,那么,一定要等到A完成后,B才有机会运行。所以系统平均周转时间为:
(100+110+120)/ 3 = 110 s
这个问题通常被称作护航效应,简单来说,就是一些耗时较少的潜在资源消费者被排在重量级资源消费者之后。
那么如何解决这个问题呢?咱们接着往下看:
1.2 最短任务优先(SJF)
最短任务优先(Shortest Job First)很好地解决了这个问题。它的策略为:先运行最短的任务,然后运行次短的任务。
当在只考虑平均周转时间的情况下,SJF显然比FIFO要好的多,同样是上面的例子,平均周转时间为:
(10+20+100)/ 3 = 50 s
事实上,考虑到所有工作同时到达的假设,我们几乎可以证明SJF确实是最优的调度算法。然而,当我们考虑实际:工作可以随时到达,这又会出现什么情况呢?
我们再用一个例子来说明:假设 A 在 t = 0 时到达,且需要运行 100s。而 B 和 C 在 t = 10 到达,且各需要运行 10s。用SJF,平均周转时间为:
(100 + (90+10)+ (100+10))/ 3 = 103.33
可以看到,SJF遭遇了同样的护航问题。
1.3 最短完成时间优先(STCF)
事实上,当 B 和 C 到达时,调度程序当然可以做其他事情:它可以抢占(preempt)工作 A,并决定运行另一个工作,或许稍后继续工作 A。那么,为了解决刚才遭遇的护航问题,我们可以向SJF添加抢占:称为最短完成时间优先(Shortest Time-to-Completion First,STCF)或抢占式最短作业优先(Preemptive Shortest Job First ,PSJF)调度程序。
他的做法是这样的:每当新工作进入系统时,它就会确定剩余工作和新工作中,谁的剩余时间最少,然后调度该工作。
补充一点:几乎所有现代化的调度程序都是抢占式的(preemptive),非常愿意停止一个进程以运行另一个进程。这意味着调度程序采用了我们之前学习的机制。特别是调度程序可以进行上下文切换,临时停止一个运行进程,并恢复(或启动)另一个进程。
因此,在我们的例子中,STCF 将抢占 A 并运行 B 和 C 以完成。只有在它们完成后,才能调度 A 的剩余时间。平均周转时间为:
(120+10+20)/ 3 = 50 s
其实,考虑可抢占的假设,可以证明STCF为最优的调度算法。
那么,假如加入新的度量指标:响应时间呢?
还是使用刚才的例子:A 在时间 0 到达,B 和 C 在时间 10 达到,假如使用STCF,平均响应时间为:
(0 + 0 + 10)/ 3 = 3.33 s
而非抢占式的FIFO和SJF的响应时间都是0s,可以看出,STCF虽然有很好的周转时间,但对于响应时间和交互性上是糟糕的。就好像我们在终端按下回车,肯定不希望在10s之后才给我们显示内容。
为此,我们要引入一个新的调度算法。
1.4 轮转(RR)
轮转(RR)调度的基本思想很简单:RR 在一个时间片内运行一个工作,然后切换到运行队列中的下一个任务,而不是运行一个任务直到结束。它反复执行,直到所有任务完成。
请注意:时间片长度必须是时钟中断周期的倍数。
为了更详细地理解 RR,我们来看一个例子:假设 3 个任务 A(5s)、B (5s)和 C(5s) 在系统中同时到达。SJF 调度程序必须运行完当前任务才可运行下一个任务。相比之下,1s 时间片的 RR 可以快速地循环工作。
SJF的平均响应时间是:(0+5+10)/ 3 = 5 s
RR的平均响应时间是:(0+1+2)/ 3 = 1 s
如你所见,时间片长度对于 RR 是至关重要的。越短,RR 在响应时间上表现越好。然而,时间片太短是有问题的:突然上下文切换的成本将影响整体性能。因此,系统设计者需要权衡时间片的长度,使其足够长,以便摊销(amortize)上下文切换成本,而又不会使系统不及时响应。
可是,如果再回过头来看周转时间,我们会发现,RR几乎是最差的。但这并不奇怪,如果周转时间是我们的指标,那么 RR 确实是最糟糕的策略之一。直观地说,这应该是有意义的:RR 所做的正是延伸每个工作,只运行每个工作一小段时间,就转向下一个工作。而因为周转时间只关心作业何时完成。
2、多考虑一些情况
2.1 结合I/O
交互式作业正在执行 I/O 时,其他 CPU 密集型作业将运行,从而更好地利用处理器。
2.2 工作长度未知
事实上,在一个通用的操作系统中,操作系统通常对每个作业的长度知之甚少。因此,我们如何建立一个没有这种先验知识的 SJF/STCF?更进一步,我们如何能够将已经看到的一些想法与 RR 调度程序结合起来,以便响应时间也变得很好?这就是我们接下来要讲的问题:多级反馈队列(MLFQ)调度方法 操作系统学习(二):浅析多级反馈队列MLFQ
3、小结
按照我们介绍的顺序,几种调度算法可以这样串起来:
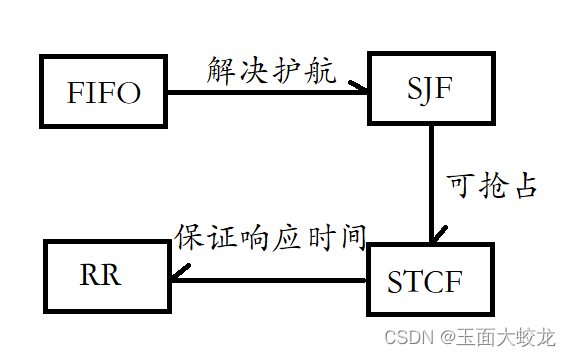
3.1 各自的优缺点
FIFO 优点:简单
缺点:平均周转时间长(护航问题)
SJF 优点:作业同时到达时,平均周转时间短
缺点:作业不同时到达时,同样面临护航问题
STCF 优点:作业不同时到达时,平均周转时间短
缺点:响应时间长
RR 优点:响应时间短
缺点:平均周转时间长
4、提到的其他技术
4.1 摊销(amortization)
摊销可以减少成本。
当系统某些操作有固定成本时,通常会使用摊销技术(amortization)。通过减少成本的频度(即执行较少次的操作),系统的总成本就会降低。例如,如果时间片设置为 10ms,并且上下文切换时间为 1ms,那么浪费大约 10%的时间用于上下文切换。如果要摊销这个成本,可以把时间片增加到 100ms。在这种情况下,不到 1%的时间用于上下文切换,因此时间片带来的成本就被摊销了。
4.2 重叠(overlap)
如有可能,重叠(overlap)操作可以最大限度地提高系统的利用率。重叠在许多不同的领域很有用,包括执行磁盘 I/O 或将消息发送到远程机器时。在任何一种情况下,开始操作然后切换到其他工作都是一个好主意,这也提高了系统的整体利用率和效率。
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌侵权/违法违规的内容, 请发送邮件至 举报,一经查实,本站将立刻删除。
文章由极客之音整理,本文链接:https://www.bmabk.com/index.php/post/124990.html

