
1.预备知识
1.基础知识
图(grarh): 由顶点(v)的集合和边(E)的集合组成,每一条也是一个点对(v,w),其中v,w属于v.
由顶点(v)的集合和边(E)的集合组成,每一条也是一个点对(v,w),其中v,w属于v.
有向图:点对是有序的,则为有向图
权或值:附着在边上的数值
路径:路径是一个顶点序列,其中,1<=i<N.
环(loop):如果图含有一条从顶点到它自身的边(v,w),该path也称作环
强连通:如果无向图从每一个顶点出发到每个其他顶点都存在一条路径。
弱联通:如果有向图不是强连通,但是他的基础图(去掉边上方向所形成的图)是连通的。
完全图:是其每一对顶点都存在一条边的图
2.现实模拟
如果任一顶点代表机场,边表示的机场间如果存在一条直达航线,那么这两个顶点就用一条边连接。边可以有一个权,表示时间、距离或飞行的费用。有理由假设,这样的一个图是有向图,因为在不同的方向上飞行可能所用时间或所花的费用会不同(例如,依赖于地方税)。可能我们更希望航空系统是强连接的,这样就总能够从任一机场飞到另外的任意一个机场。我们也可能愿意迅速确定任意两个机场之间的最佳航线。“最佳”可以是指最少边数的路径,也可以是对一种或所有权重量度所算出的最佳者。
2.图的表示
1.考虑有向图
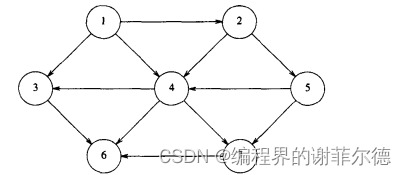
2.adjacent matrix(dense)
表示图的一种简单方法是使用二维数组,称为邻接矩阵( adjacent matrix)表示法。对于每条边(u, v),置A[u][v] = true;否则,数组的项就是false。如果边有一个权,那么可以置A[u] [v]等于该权,而使用一个很大或者很小的权作为标记表示不存在的边。例如,如果要寻找最便宜的航空路线,那么可以用值0来表示不存在的航线。如果出于某种原因要寻找最昂贵的航线,那么可以用无穷(或者使用0)来表示不存在的边。
虽然这种表示的优点是非常简单,但是,它的空间需求则为O(),如果图的边不是很多,那么这种表示的代价就太大了。若图是稠密的(dense):E = O(),则邻接矩阵是合适的表示方法。不过,在我们将要看到的大部分应用中,情况并不如此。例如,设用图表示一个街道地图,街道呈曼哈顿式,其中几乎所有的街道或者南北向、或者东西向。因此,任一路口大致都有四条街道,于是,如果图是有向图且所有的街道都是双向的,则E=4V。如果有3000个路口,那么就得到一个3000顶点的图,该图有12 000条边,它们需要一个大小为9 000 000的数组。该数组的大部分项将是0。这从直观来看很糟,因为我们想要数据结构表示那些实际存在的数据,而不是去表示不存在的数据。
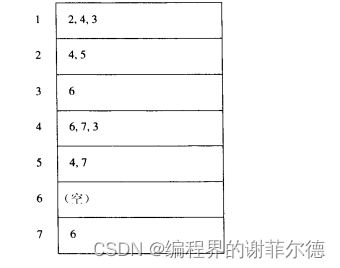
3.adjacent list(SPARSE稀疏)
对每一个顶点,我们使用一个表存放所有邻接的顶点。此时的空间需求为O(|E|+|V|),
它相对于图的大小而言是线性的’。最左边的结构只是头单元(header cell)的数组。这种表示方法从可以清楚地看出。如果边有权,那么这个附加的信息也可以存储在单元中。
邻接表是表示图的标准方法。无向图可以类似地表示;每条边(u,v)出现在两个表中,因此空间的使用基本上是双倍的。在图论算法中通常需要找出与某个给定顶点v邻接的所有的顶点。而这可以通过简单地扫描相应的邻接表来完成,所用时间与这些找到的顶点的个数成正比。
有很多方法可以维护邻接表。首先,要注意到这些表自身可以通过vector或list来维护。然而,对于稀疏图,当使用vector时,程序员需要将每一个vector都初始化为比默认值稍小一-点的容量,否则就会浪费大量的空间。
由于快速得到任何顶点的邻接顶点列表很重要,所以有两个基本的选择:或者使用图(map),其键为顶点,值为邻接表,或者将每个邻接表作为vertex类的成员函数处理。第一个选择似乎简单些,但是第二个选择更快,因为避免了在图中的重复查找。
对第二种情况,如果顶点是string (例如机场的名字或者路口的名字),那么可以使用图。其中,键是顶点的名字,值是vertex(典型的是一个指向vertex的指针),并且每一个vertex对象都有一个邻接顶点(指向顶点的指针)的列表,可能还包括原始的string名。
3. 拓扑排序
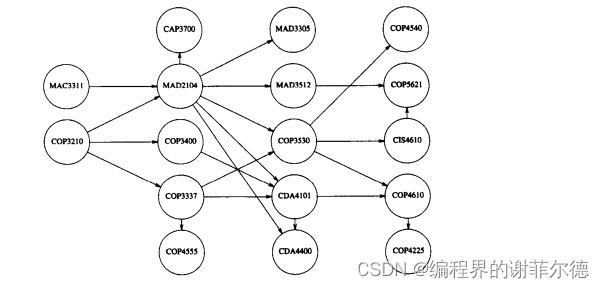
拓扑排序( topological sort)是对有向无环图的顶点的–种排序,它使得如果存在–条从到,的路径,那么在排序中出现在,的后面。下图表示了迈阿密州立大学的课程结构。有向边(v, w)表明课程v必须在课程w选修前修完。这些课程的拓扑排序不会破坏课程结构要求的任意课程序列。
一个简单的求拓扑排序的算法是先找出任意一个没有入边的顶点。然后显示出该顶点,并将它和它的边一起从图中删除。然后,对图的其余部分应用同样的方法处理。
为了将上述方法公式化,我们把顶点v的入度( indegree)定义为边(u,v)的条数。计算图中所有顶点的入度。假设每一个顶点的入度被存储且图被读入一个邻接表中。
1. FindInDegree()函数的实现:
FindInDegree()函数的实现思路:
1:定义两层循环遍历整个邻接表
2:定义指向各个边结点的指针,
此指针从指向某结点链表的第一个邻接点开始,遍历整个顶点链表,
当某边结点邻接点域等于i时,计数变量自增
3:邻接表遍历结束后,将计数变量的值赋予indegree[i]数组单元
void FindInDegree(ALGraph G, int indegree[]) {
for (int i = 0; i < G.vexnum; i++) {
int cnt = 0;//设置变量存储邻接点域为i的结点个数
for (int j = 0; j < G.vexnum; j++) {
ArcNode* p = new ArcNode;//定义指向各个边结点的指针
p = G.vertices[j].firstarc;
while (p) {//当p未指到单个链表的末尾时继续循环
if (p->adjvex == i)//当某边结点邻接点域等于i时,计数变量++
cnt++;
p = p->nextarc;//指针不断向后指
}
indegree[i] = cnt;//将计数结果保留在indegree数组中
}
}
}
2.拓扑排序实现
拓扑排序算法思路:
1:求出各结点的入度存入数组indegree中
2:遍历indegree[i]数组,将单元值为0的编号值i进栈
3:将栈顶元素保存在topo数组中,并将此元素出栈。
4:定义指向边结点的指针,使该指针从出栈元素的第一个边结点开始依次向后指,遍历某顶点元素的所有边结点,并将每个边结点对应的indegree数组单元值自减,当indegree单元值为0时,将该边结点邻接点域进栈
5:最后将m和有向图顶点比较,若两者相等,则该图是有向无环图。
Status TopologicalSort(ALGraph G, int topo[]) {
//有向图G采用邻接表存储结构
//若G无回路,则生成G的一个拓扑排序topo[]并返回OK,否则ERROR
FindInDegree(G, indegree);//求出各结点的入度存入数组indegree中
SqStack S;
InitStack(S);//初始化栈
for (int i = 0; i < G.vexnum; i++) {
if (!indegree[i]) Push(S, i);//入度为0者进栈
}
int m = 0;//对输出顶点计数u,初始为0
while (!StackEmpty(S)) {
int i = 0;
Pop(S, i);//将栈顶顶点vi出栈
topo[m] = i;//将vi保存在拓扑序列数组topo中
++m;//对输出顶点计数
ArcNode* p = new ArcNode;
p = G.vertices[i].firstarc;//p指向vi的第一个邻接点
while (p != NULL) {
int k = p->adjvex;//vk为vi的邻接点
--indegree[k];//vi的每个邻接点的入度减一
if (indegree[k] == 0) Push(S, k);//若入度减为0,则入栈
p = p->nextarc;//p指向顶点vi下一个邻接结点
}
}
if (m < G.vexnum) return ERROR;//该有向图有回路
else return OK;
}
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌侵权/违法违规的内容, 请发送邮件至 举报,一经查实,本站将立刻删除。
文章由极客之音整理,本文链接:https://www.bmabk.com/index.php/post/129642.html

