
ROS系列——rqt的安装以及使用方法介绍
1. 安装
安装极其简单,不多介绍,直接上命令:
Melodic:
sudo apt-get install ros-melodic-rqt
sudo apt-get install ros-melodic-rqt-common-plugins
Noetic
sudo apt-get install ros-noetic-rqt
sudo apt-get install ros-noetic-rqt-common-plugins
2. 部分工具的功能介绍及使用方法
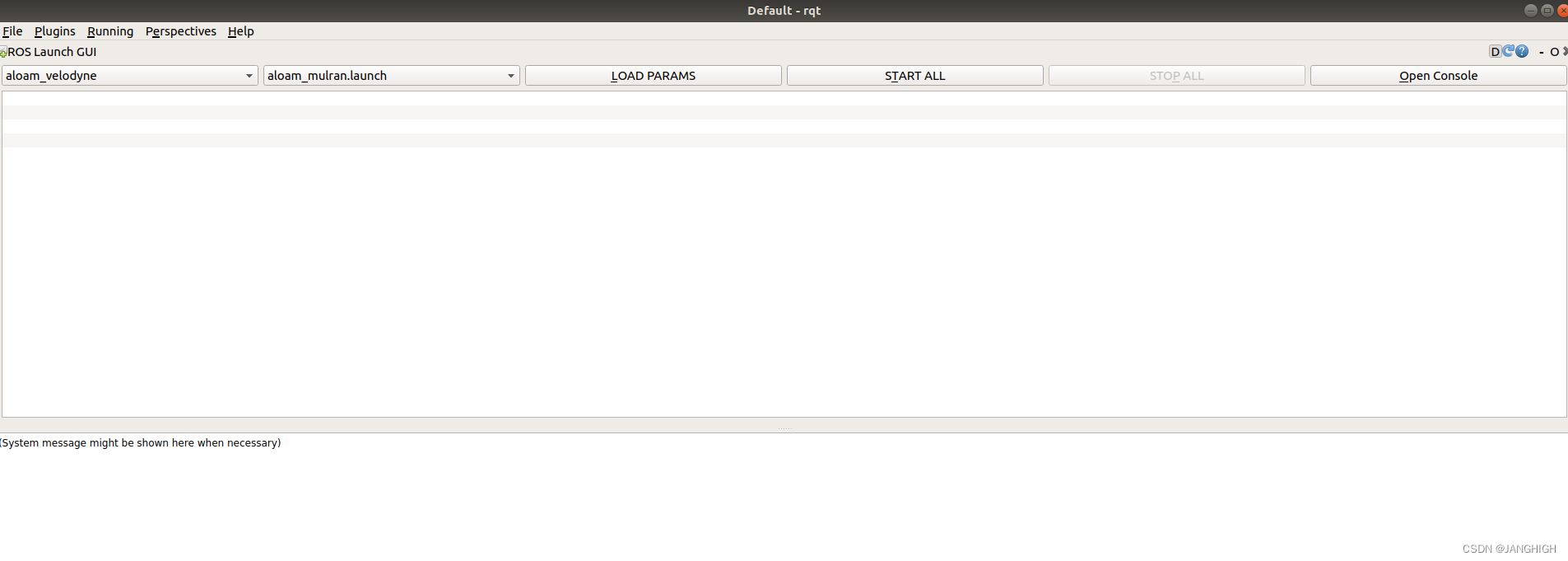
1)rqt_gui
介绍:rqt_gui可以认为是rqt的所有功能的集合
使用:
rosrun rqt_gui rqt_gui
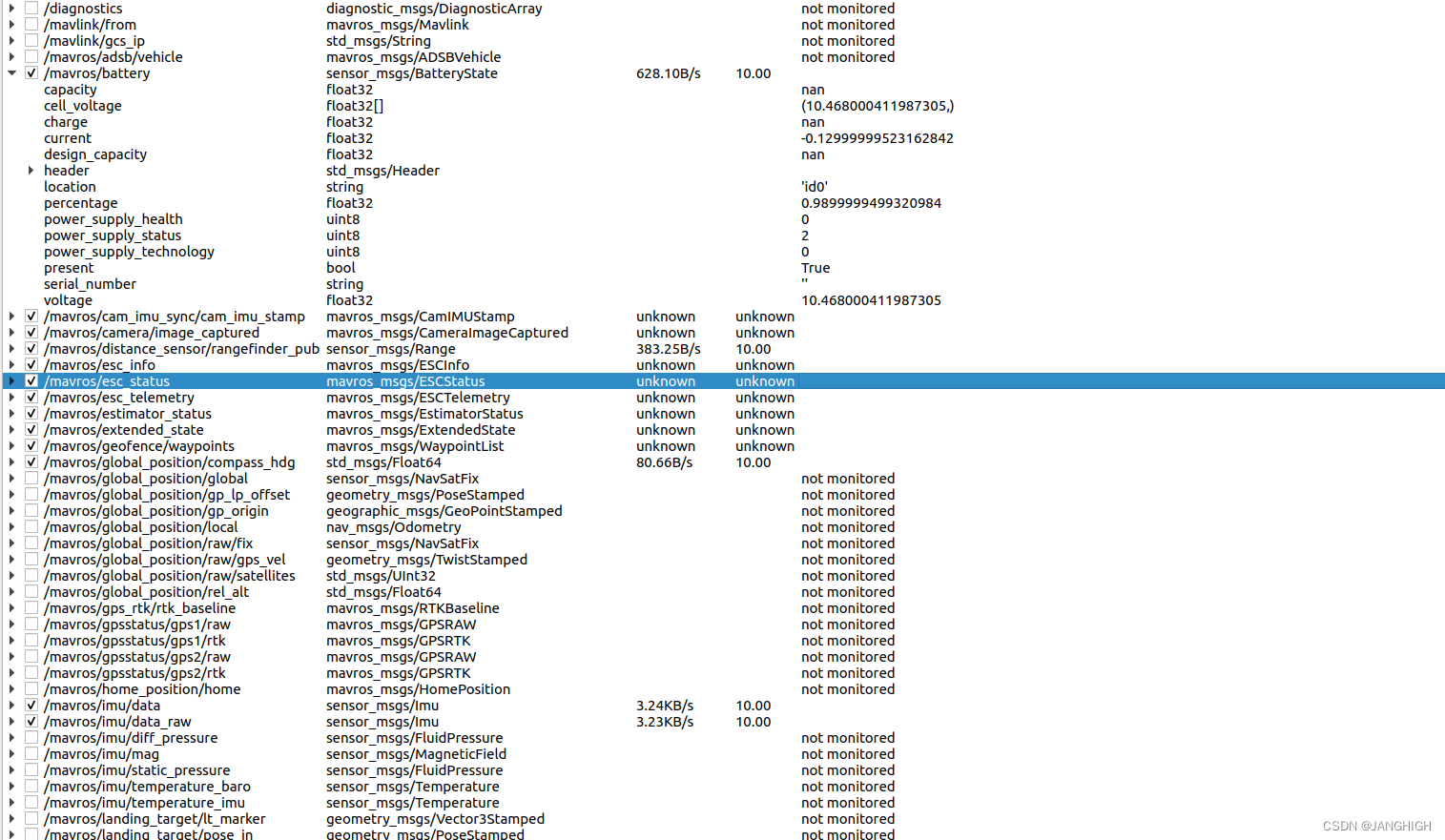
2)rqt_topic
介绍:rqt_topic能够显示出Topic信息以及数值
使用:
rosrun rqt_topic rqt_topic
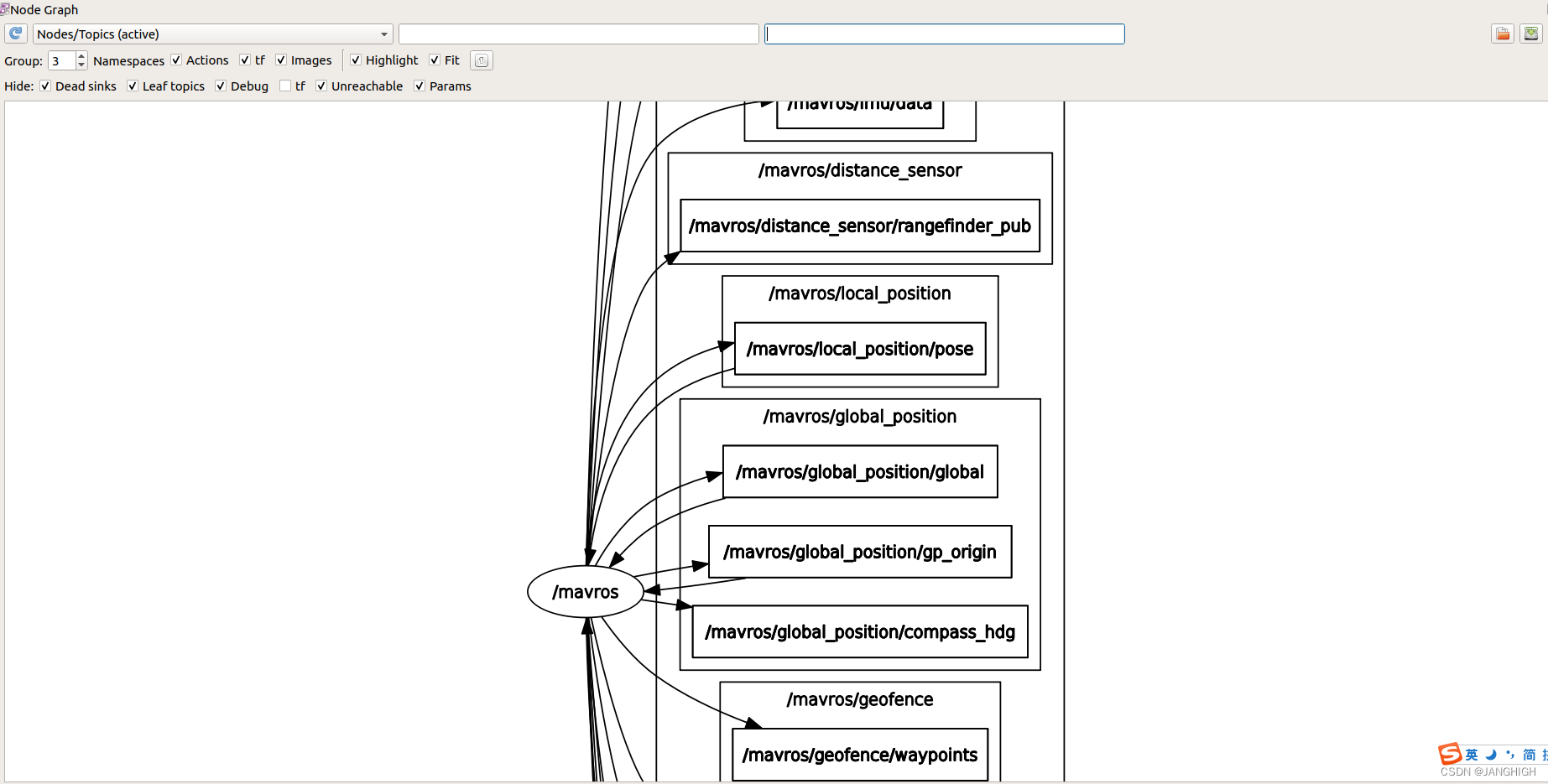
3)rqt_graph
介绍:rqt_graph能够创建一个显示当前系统ROS程序运行情况的动态图形,用图形表示当前活动中的节点与在ROS网络上传输的消息之间的相关性。
使用:
rosrun rqt_graph rqt_graph
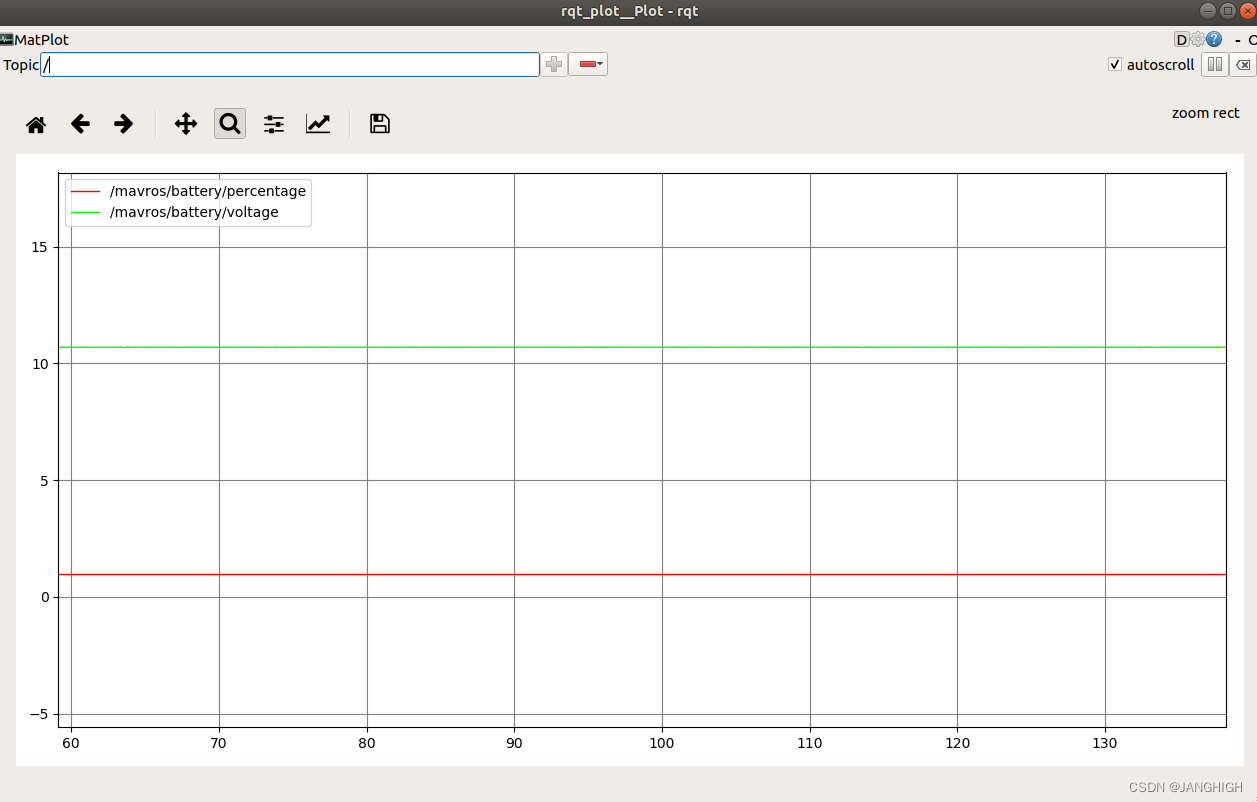
4)qt_plot
介绍:qt_plot是一个二维数据绘图工具,可以画出topic对应的msg即它将接收到ROS消息的数值绘制到坐标系中。例如,绘制飞控系统的电量等
使用:
rosrun rqt_plot rqt_plot
5)rqt_service_caller
介绍:rqt_service_caller服务请求可视化程序,方便服务的请求与接收
使用:
rosrun rqt_service_caller rqt_service_caller

6)rqt_bag
介绍:rqt_bag是一个可以将bag进行可视化的GUI工具,可以play bag包
使用:
rosrun rqt_bag rqt_bag
备注:rqt_bag在作者的电脑上经常崩溃
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌侵权/违法违规的内容, 请发送邮件至 举报,一经查实,本站将立刻删除。
文章由极客之音整理,本文链接:https://www.bmabk.com/index.php/post/130111.html

