
安装依赖
ros
Ceres Solver
PCL
安装
cd ~/catkin_ws/src
git clone https://github.com/HKUST-Aerial-Robotics/A-LOAM.git
cd ../
catkin_make
source ~/catkin_ws/devel/setup.bash
如果你只想编译ALoam功能包,可以在catkin_make后面添加-DCATKIN_WHITELIST_PACKAGES=”aloam_velodyne”命令,如下:
catkin_make -DCATKIN_WHITELIST_PACKAGES="aloam_velodyne"
bag包测试
roslaunch aloam_velodyne aloam_velodyne_VLP_16.launch
rosbag play YOUR_DATASET_FOLDER/nsh_indoor_outdoor.bag
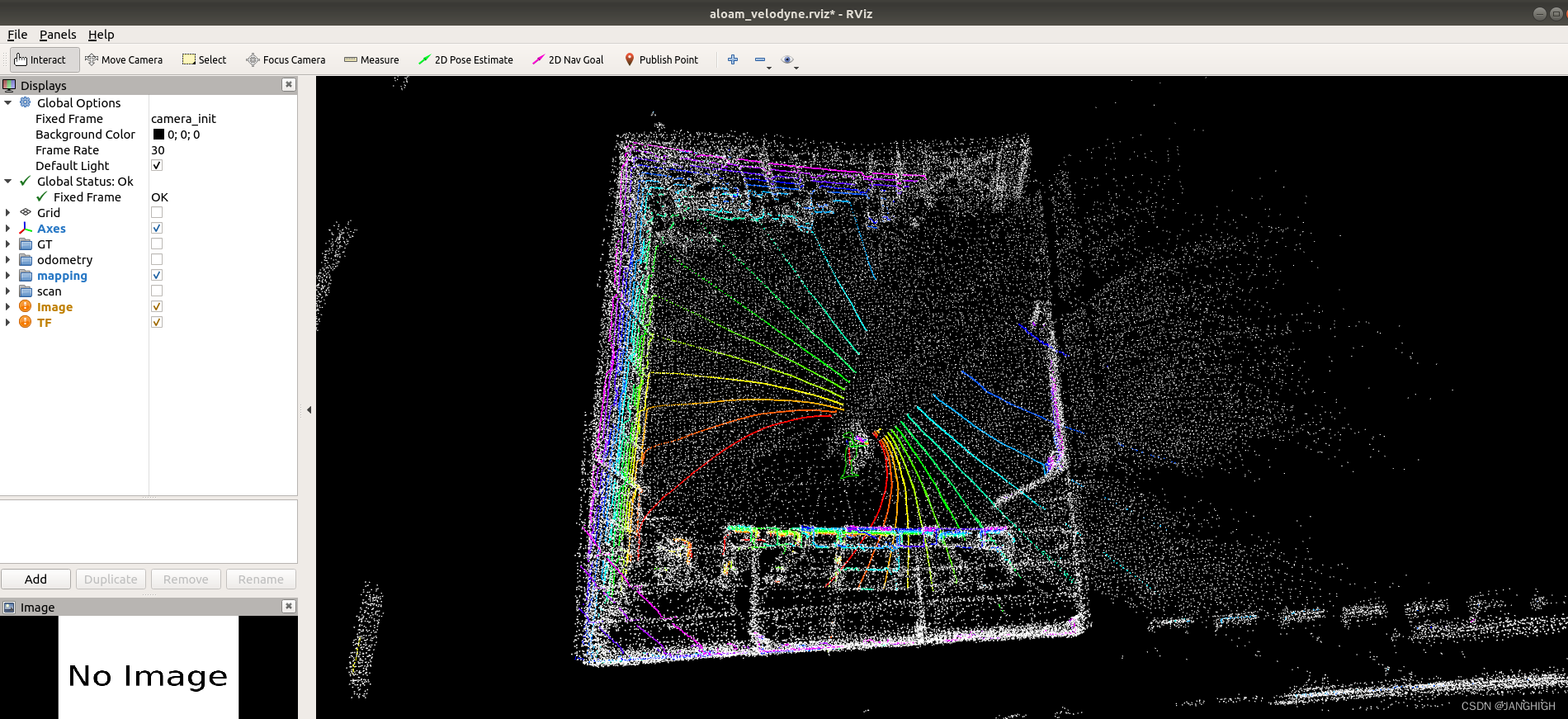
测试截图如下:
问题解决
问题1
如果运行
roslaunch aloam_velodyne aloam_velodyne_VLP_16.launch
出现如下错误:
[alaserOdometry-3] process has died [pid 23572, exit code 127, cmd xxxxxxx_ws/devel/lib/aloam_velodyne/alaserOdometry __name:=alaserOdometry __log:=xxxxxxx/.ros/log/76115896-bef6-11eb-962f-94e6f7e52acc/alaserOdometry-3.log].
log file:xxxxxxx/.ros/log/76115896-bef6-11eb-962f-94e6f7e52acc/alaserOdometry-3*.log
[alaserMapping-4] process has died [pid 23574, exit code 127, cmd xxxxxxx_ws/devel/lib/aloam_velodyne/alaserMapping __name:=alaserMapping __log:=xxxxxxx/.ros/log/76115896-bef6-11eb-962f-94e6f7e52acc/alaserMapping-4.log].
log file:xxxxxxx/.ros/log/76115896-bef6-11eb-962f-94e6f7e52acc/alaserMapping-4*.log
解决1
卸载glog后,重新运行launch文件,问题解决!
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌侵权/违法违规的内容, 请发送邮件至 举报,一经查实,本站将立刻删除。
文章由极客之音整理,本文链接:https://www.bmabk.com/index.php/post/130124.html

