
WSL安装
-
win10下,按下 Win + R ,输入 winver 点击,确定查看操作系统内部版本,19041以后的版本即可


-
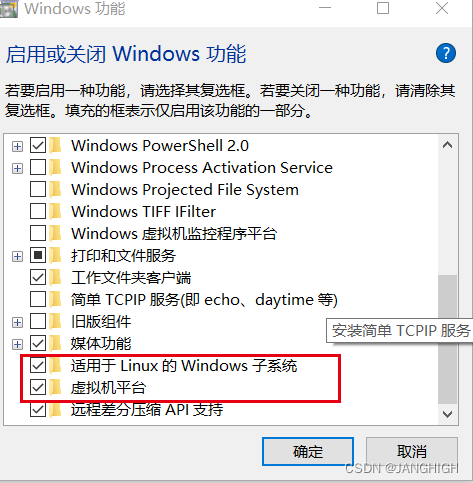
在“控制面板\所有控制面板项\程序和功能”页面点击,启用或关闭Windows功能
勾选 适用于Linux的Windows子系统 虚拟机平台 两个选项
-
重启电脑
-
以管理员模式运行命令提示符(cmd) 输入如下指令,该命令安装的是Ubuntu 20.04 LTS 版本
wsl –install -d Ubuntu-20.04 -
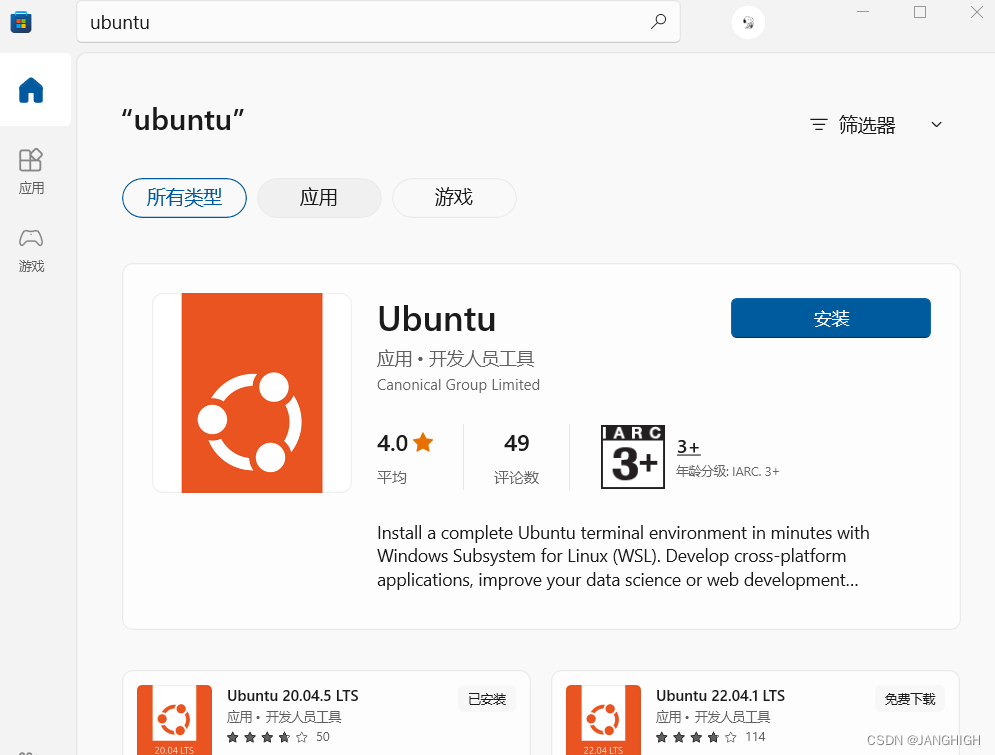
或者 通过Microsoft Store安装,输入“ubuntu”,选择需要安装的版本安装

WSL配置
-
开始菜单启动 Ubuntu 20.04 LTS
-
乌班图子系统换源(以下简称子系统或者Ubuntu)
(Ubuntu)切换阿里源,输入以下命令:
sudo sed -i s@/archive.ubuntu.com/@/mirrors.aliyun.com/@g /etc/apt/sources.list -
win10安装VcXsrv
下载地址VcXsrv -
查看WIN10的IP地址,假设本机IP: 192.168.3.16
-
(Ubuntu)在**.bashrc**文件中添加一行输出地址
echo “export DISPLAY=192.168.3.16:0.0” >> ~/.bashrc其中 “192.168.3.16” 就是你刚刚得到的ipv4地址
source ~/.bashrc -
(Ubuntu)安装一个图形桌面环境,比如Xfce4,终端输入以下命令
sudo apt-get update
sudo apt-get install xfce4 -
启动桌面环境
1)win10下运行XLaunch软件

2)子系统(Ubuntu)终端运行以下命令
startxfce4
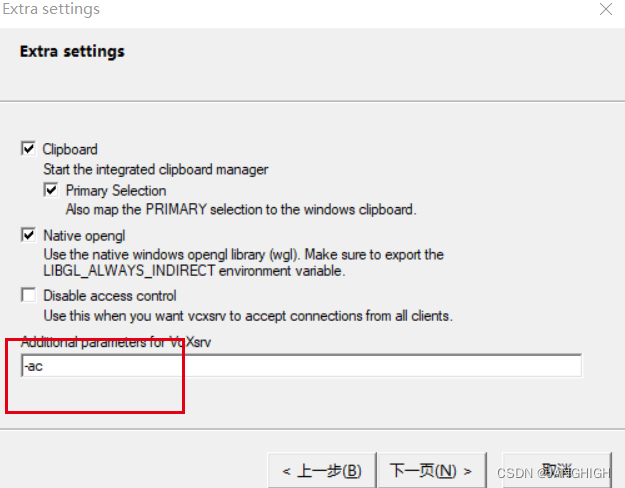
注意:如果无法正确输出,可以添加 -ac 参数到 Xlaunch中(win10),如下
3)如若操作成功,会出现如下界面

ROS的安装
既然有了图形化界面,安装Ros,可以参考我之前的Ros Melodic安装方法,移步Ubuntu18.04安装Ros Melodic以及出错解决方法。
因为这里安装的是Ubuntu20.04,所以ROS安装的版本是noetic版本。
测试
在Ubuntu子系统开终端,分别输入如下命令:
-
roscore
-
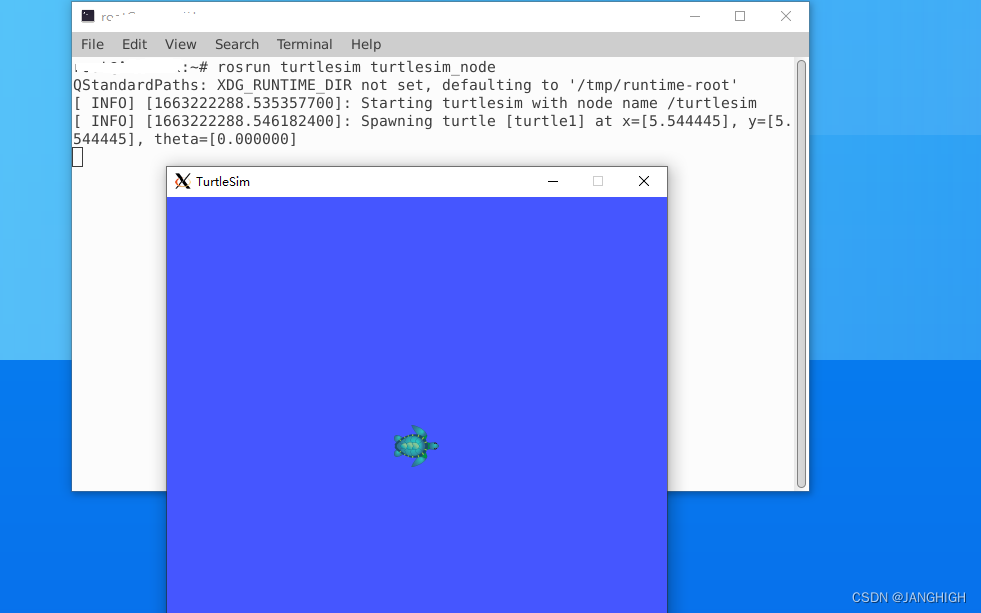
rosrun turtlesim turtlesim_node
-
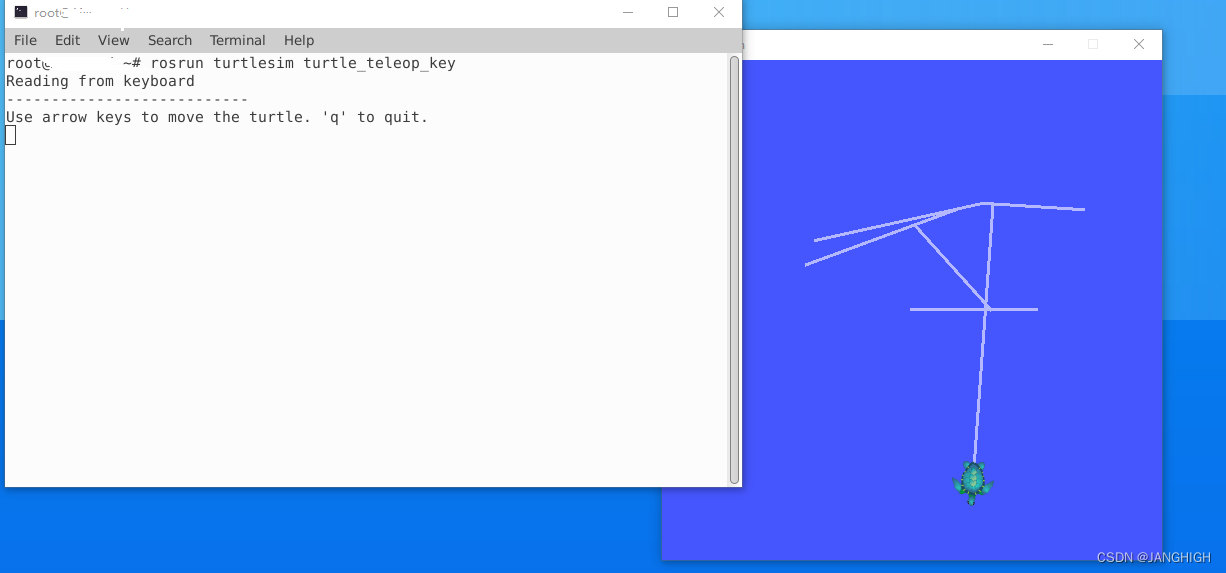
rosrun turtlesim turtle_teleop_key
注意:运行第二条指令时,如若出现error while loading shared libraries: libQt5Core.so.5: cannot open shared object file: No such file or directory错误
终端执行,如下指令
sudo apt-get install libqt5core5a
sudo strip –remove-section=.note.ABI-tag /lib/x86_64-linux-gnu/libQt5Core.so.5
至此,已完成了Ros的简单小海龟测试!
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌侵权/违法违规的内容, 请发送邮件至 举报,一经查实,本站将立刻删除。
文章由极客之音整理,本文链接:https://www.bmabk.com/index.php/post/130133.html

