
安装Ros Melodic
1.配置Ubuntu存储库
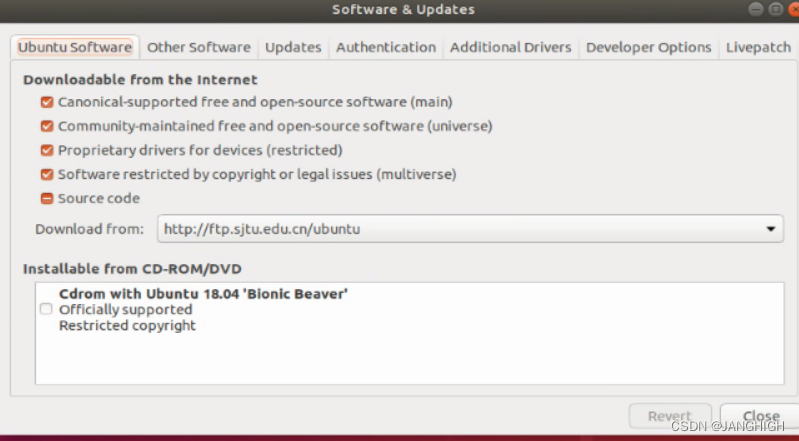
打开软件中心(Software&Updates)
将Ubuntu 存储库配置为允许“restricted”、“universe”和“multiverse”。设置如下图所示。
2.设置sources.list
开启终端输入:
sudo sh -c ‘echo “deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main” > /etc/apt/sources.list.d/ros-latest.list’
如果使用镜像,只需在设置sources.list文件时运行以下命令中的一个即可:
- 清华源:
sudo sh -c ‘. /etc/lsb-release && echo “deb http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/lsb_release -csmain” > /etc/apt/sources.list.d/ros-latest.list’ - 上海交通大学源:
sudo sh -c ‘. /etc/lsb-release && echo “deb http://mirrors.sjtug.sjtu.edu.cn/ros/ubuntu/lsb_release -csmain” > /etc/apt/sources.list.d/ros-latest.list’
3.设置密钥
如果还没有安装curl,首先终端执行一下命令:
sudo apt install curl
继续终端输入:
curl -s https://raw.githubusercontent.com/ros/rosdistro/master/ros.asc | sudo apt-key add –
4.安装ROS
终端运行:
sudo apt update
推荐安装桌面完整版(包括ROS、rqt、rviz、机器人通用库、2D/3D 模拟器和 2D/3D 感知):
sudo apt install ros-melodic-desktop-full
也可以安装其它配置的版本,命令如下:
桌面安装: ROS、rqt、rviz和机器人通用库
sudo apt install ros-melodic-desktop
ROS-Base:(Bare Bones) ROS 包、构建和通信库,没有 GUI 工具
sudo apt install ros-melodic-ros-base
单个包,将PACKAGE替换为包名称即可
sudo apt install ros-melodic-PACKAGE
5. 环境设置
终端输入命令:
echo “source /opt/ros/melodic/setup.bash” >> ~/.bashrc
source ~/.bashrc
6.构建包的依赖项
sudo apt install python-rosdep python-rosinstall python-rosinstall-generator python-wstool build-essential
初始化rosdep
sudo apt install python-rosdep
sudo rosdep init
rosdep update
7.测试
开启3个终端
第一个终端输入:roscore
第二个终端输入:rosrun turtlesim turtlesim_node
第三个终端输入:rosrun turtlesim turtle_teleop_key
最终可以通过键盘的“上下左右”键控制小海龟
8. 问题及解决
问题1:运行sudo rosdep init时,出现
ERROR: cannot download default sources list from:
https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/sources.list.d/20-default.list
Website may be down.
解决1:终端运行如下命令:
cd /etc
sudo gedit hosts
在打开的文件中添加如下命令:
185.199.108.133 raw.githubusercontent.com
问题2: rosdep update
ERROR: error loading sources list:
(‘The read operation timed out’,)
解决2:
更换不同网络进行多次尝试
参考:http://wiki.ros.org/melodic/Installation/Ubuntu
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌侵权/违法违规的内容, 请发送邮件至 举报,一经查实,本站将立刻删除。
文章由极客之音整理,本文链接:https://www.bmabk.com/index.php/post/130137.html

